AIは「ノミ」を握れない。宮大工の技をロボットに移植する、千葉大・平沢岳人教授の人工技能の取り組み


生成AIがホワイトカラーの業務を一変させる一方で、フィジカルな建設現場には依然として「身体性」の壁が立ちはだかります。
「AIには手足がない。だから家は建てられない」。
そう語るのは、千葉大学大学院工学研究院の平沢岳人教授です。
彼が提唱するのは、熟練職人の所作を工学的に再構築する「人工技能(Artificial Skill)」。墨田区の町工場街に開設された共創拠点「SUMIDA TECNET LABO」で、建設産業のボトルネックを解消するロボット実装の取り組みについて伺いました。
話を聞いた人
平沢 岳人 さん
千葉大学大学院 工学研究院 建築学コース 教授
博士(工学)。建築構法、計算機利用を専門とし、宮大工の技を工学的に解明する「人工技能」を提唱。新国立競技場のコンペを機にソフトウェア研究から「モノづくり」へ回帰。現在は産学官連携による実証実験を主導する、現場主義を貫く研究者。
平沢研究室Webサイト
https://www.hlab-arch.jp/
「6軸」の傾きと「7軸」の足:ロボットが職人になる条件
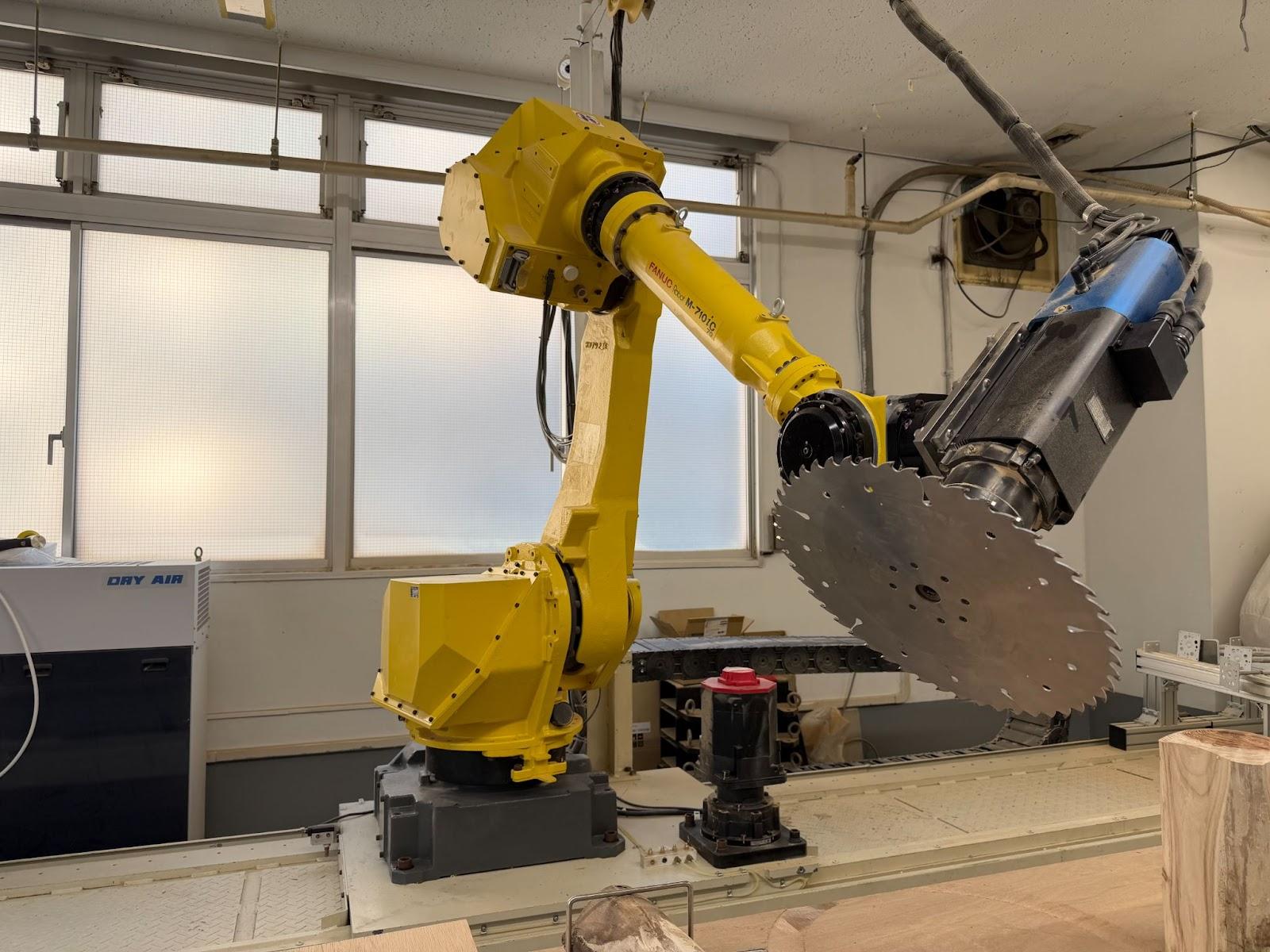
東京都墨田区にある「SUMIDA TECNET LABO」。ラボには、可搬重量70kgの産業用ロボットアームが鎮座しています。一見、自動車ラインで見る溶接ロボットと同じに見えますが、平沢氏はこの機体の本質について、まず「6軸(アーム)」と「第7軸(足元)」の役割分担から語り始めました。
「普通の工作機械(3軸NCルーター)にはXYZの『位置』しかありませんが、ロボットには『姿勢(傾き)』があります。これが決定的な違いです」
従来の3軸加工機は、上から垂直にしか刃を入れられません。そのため、裏側がえぐれた形状(アンダーカット)や、ひょうたんのような曲面を作るには、重い材料をわざわざひっくり返す「段取り替え」が必要でした。
しかし、6軸ロボットは違います。人間の職人が体を捻ってノミを入れるように、刃物の角度を自在に傾けることができます。
「刃を斜め下から入れたり、障害物を避けて回り込んだりします。この『姿勢』の自由度があるからこそ、複雑な伝統建築の仕口も、材料を固定したまま削り出せるのです」
さらに、平沢氏が「これが人間の『足運び』を再現する」と強調するのが、足元に実装された「第7軸(走行台)」です。
「例えば3メートルある柱を加工する場合、固定された機械では材料の方を動かさなければなりません。しかし、一度掴んだ材を離せば、コンマ数ミリのズレは避けられない。職人ならどうするか。自分が歩いて移動しますよね」
このロボットは、7軸目のレールを使って自ら移動し、常に最適な「姿勢」を維持しながら加工します。6軸で上半身の「姿勢」を作り、7軸で下半身の「移動」を作る。これによって、長尺材でも段取り替えなしに、端から端まで高精度に削りきることが可能になるのです。
「画面の中」から「モノ」へ:五輪コンペでの原体験

そもそも、なぜ平沢氏はここまで「フィジカル(実物)」にこだわるようになったのでしょうか。その原点は、2012年の新国立競技場のデザインコンペにあります。
かつて平沢氏は、知識データベースやVR、シミュレーションなど、ソフトウェア中心の研究を手がけていました。しかし、40代を迎えた頃、研究者としてある壁にぶつかっていました。
「正直に言うと、CAD中でモデルを構築するだけの研究に飽きてしまっていたんです(笑)」
そんな時、オリンピックに向けた新国立競技場のコンペの模型製作の依頼を受けました。
「私たちは3Dプリンターをいち早く導入し、精緻な建築模型を作って応募しました」
提案自体は実現に至りませんでしたが、そこで得た感覚は強烈でした。
「コンペの結果は残念なものでしたが、デジタルデータが物理的なモノとして立ち上がった瞬間の高揚感は忘れられませんでした。『やっぱりモノを作らないと面白くない』と痛感したんです」
デジタルの世界に閉じた研究から、実体を持つモノを動かす研究へ。その気づきが、5軸加工機やロボットアームの導入へとつながり、現在の「人工技能」の研究へと進むきっかけになりました。
「AI」ではなく「幾何学」:宮大工の暗黙知を形式知化する

ロボットという「身体」を手に入れた平沢氏が次に目指したのは、熟練の技の移植です。ここで提唱されたのが「人工技能」という概念でした。
「AIは計算(脳)の領域ですが、モノづくりには出力(身体)が必要です。私が2012年頃から伝統木造に着目したのは、宮大工の技術が極めて高度でありながら、実は数式で記述可能な『幾何学』に基づいていると気づいたからです」
宮大工の技法「規矩術(きくじゅつ)」は、一見すると属人的な暗黙知の塊にみえます。しかし、その本質は3次元的なインターセクション(交差)の計算であり、幾何学として定式化できます。
つまり、教科書的な「型」さえ理解すれば、職人の経験値を「知識関数(スクリプト)」としてアルゴリズムに落とし込むことが可能なのです。
「宮大工がやっていることも、私がロボットでやることも、二つの部材がどう組み合うかという『幾何学的なかみ合わせ(インターフェース)』を作るという意味では同じです。幾何学であれば、ロボットは人間よりも遥かに正確に再現できます」
【参考:規矩術(きくじゅつ)とは】
指矩(さしがね/L字型の定規)一本で、複雑な屋根の勾配や、木材同士の接合部(仕口・継手)の形状を割り出す伝統技法。高度な空間幾何学を経験則として体系化したもので、平沢教授はこれを「アルゴリズム」として再定義している。
「コンクリートのお寺」への悔しさ:現場の断絶を埋める

技術を確立した平沢氏が、なぜここまで「社会実装」にこだわるのか。その原動力となったのが、ある建設会社から寄せられた切実な相談です。
「あるお寺の計画で、コスト等の問題から『木造』を断念し『コンクリート造』にせざるを得ない状況に陥っていました。しかし、建設会社側には『本来あるべき木造の姿で建てたい』という強い思いがあった。そこで、『最新技術を使えば解決できるのではないか』と、私の元へ話が持ち込まれたのです」
ここには、建設業界全体が抱える構造課題が表れています。 設計(デジタル)と施工(フィジカル)の深い断絶です。BIM(Building Information Modeling)などのデジタル化が進んでも、現場にそれを受け止める加工技術や人員がなければ、設計データは“出口”を失ってしまいます。
「データを作っても、モノにならなければ意味がない。『人工技能』を搭載したロボットは、行き場を失ったBIMデータの『出口戦略』そのものなんです」
このラボには今、建築業界だけでなく、樹脂加工や型枠製作など、多種多様な企業が「駆け込み寺」のように訪れています。「人間には削れない複雑な形状」を、ロボットなら涼しい顔で形にできるからです。
直径110mmをフルに活かす人工技能
「人工技能」のインパクトは、単なる省力化に留まりません。資源効率の面でも大きな変化をもたらします。
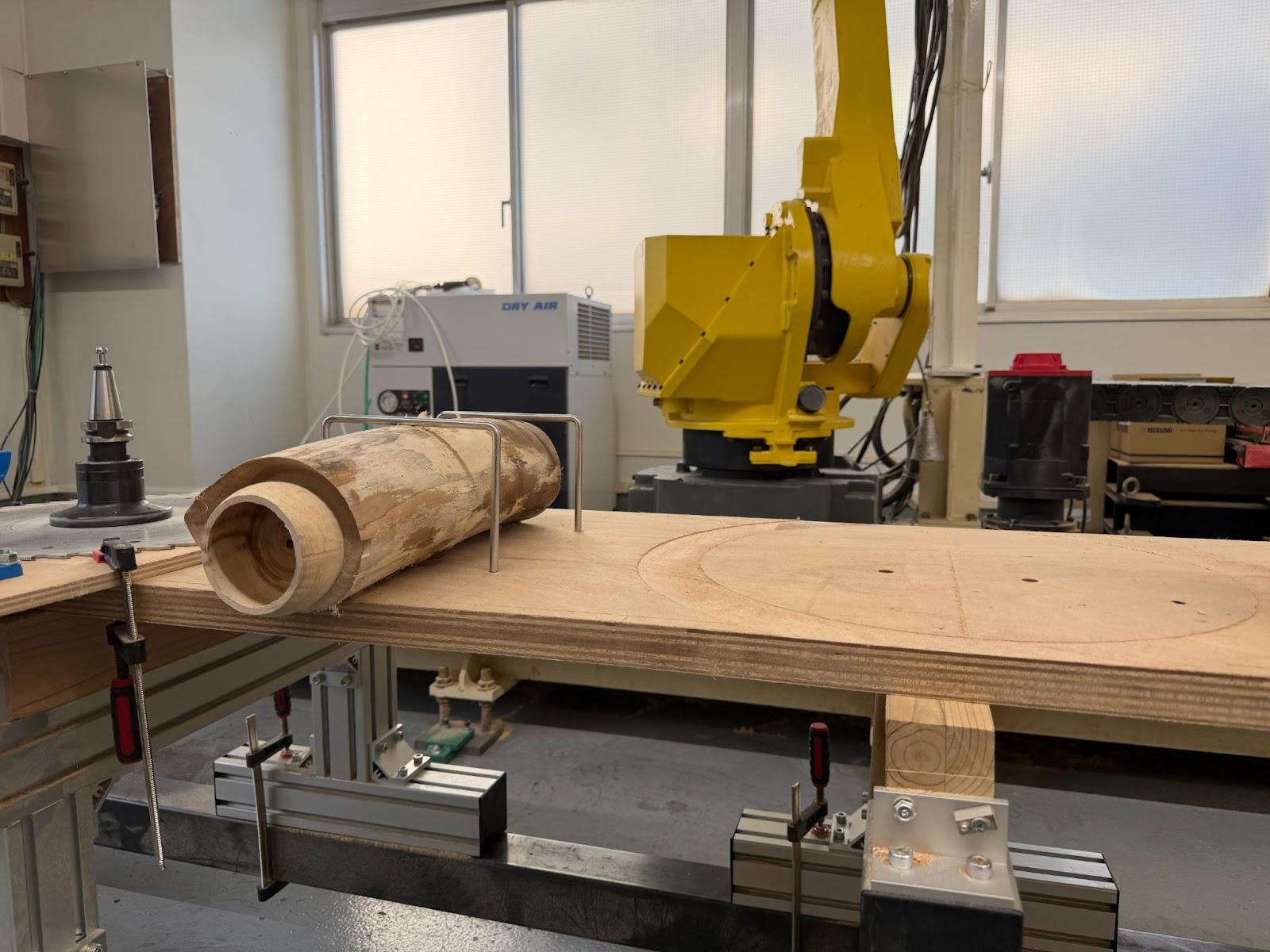
「例えば、直径110mmの丸太から部材を作る場合、人間だと安定させるために一度四角く製材してしまいます。そうすると、70mm角程度の材しか取れません」
しかし、ロボットならば直径110mmの太さを、そのままフルに活かすことができます。
ロボットは丸太の中心軸を自動的に検出し、材料を最大限活かしながら複雑な形状を削り出します。人間には加工が面倒で捨てられていた木材も、ロボットなら価値ある製品に変えられる。この技術は、林業や資源活用の観点からも大きな可能性を秘めています。
社会実装の壁:コストと安全のジレンマ
技術的には宮大工の技を再現できるようになりつつありますが、社会実装にはまだ高い壁があります。一つは「コスト」です。
「伝統木造を支えているのは個人の宮大工や小規模な工務店ですが、彼らには数千万円もするロボットを導入する資金力はありません」
だからこそ、平沢氏は「まずは自社で持たずに、このラボを使ってくれればいい」と、シェアリング型の活用を促しています。
もう一つは、「パワーと安全のジレンマ」です。
「協働ロボット」は安全ですが、建築部材を加工するパワーがありません。一方、パワーのある産業用ロボットは、人間が近づけば凶器になります。
「今のところ、人とロボットが同じ空間で混在して作業するのは、安全面や法規制の観点から難しいのが現実です」
未来の工務店:ロボットが「弟子」になる日
それでも、平沢教授は諦めていません。「まずは動くものを作る」をモットーに、机上の空論ではなく、実際に削り出したモノを企業に見せることで、少しずつ認識を変えようとしています。
平沢氏が描く未来図は、ロボットが職人を駆逐する世界ではなく、「職人の横でロボットが働く」風景です。
「将来的には、宮大工の工務店や加工場に、こういったロボットが導入される状態を実現したいと考えています。職人が1人しかいない小さな工務店でも、重労働や下加工はロボットという“弟子”が担い、最終的な仕上げや判断は職人が担う。そんな分業の形を目指しています」
後継者不足にあえぐ中小の現場にこそ、この技術は必要とされるはずです。
宮大工の技を数式に置き換え、ロボットという身体を与えて保存・継承する。平沢教授の挑戦は、日本のインフラと伝統技術が生き続けるための、新たな選択肢を示しています。